
Ein internationales Forschungsteam hat fliegende 3D-Drucker entwickelt, die kooperativ Strukturen bauen und reparieren können. Die Inspiration für das Projekt liefern Bienen und Wespen. Die Technologie könnte in Zukunft für Konstruktionsmaßnahmen an schwer zugänglichen oder gefährlichen Orten, etwa an hohen Gebäuden, zum Einsatz kommen, so die Forschenden.
3D-Druck gewinnt in der Bauindustrie zunehmend an Bedeutung. Sowohl auf Baustellen als auch in Fabriken drucken stationäre und mobile Roboter Strukturen für den Einsatz in Bauprojekten, beispielsweise aus Stahl oder Beton. Im Fachmagazin „Nature“ beschreibt ein internationales Forschungsteam das Projekt „Aerial Additive Manufacturing (Aerial-AM)“. Dieser neue Ansatz für den 3D-Druck mit fliegenden Robotern, die kooperativ arbeiten, ist von Baumeistern aus der Natur wie Bienen und Wespen inspiriert.
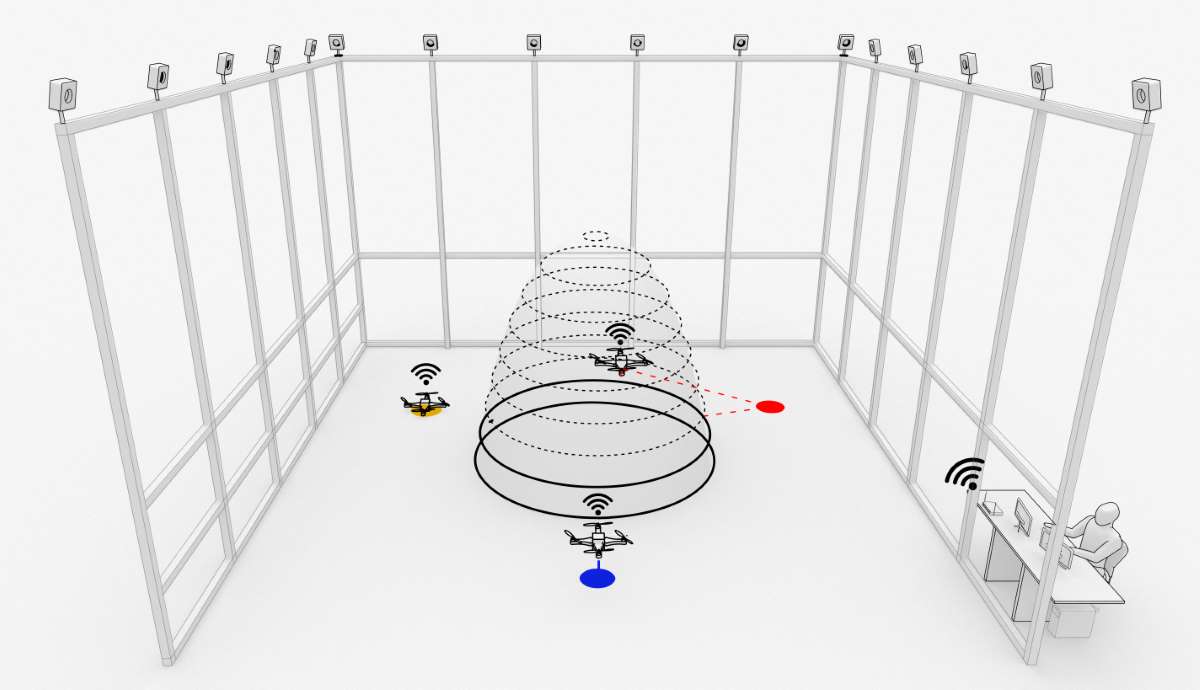
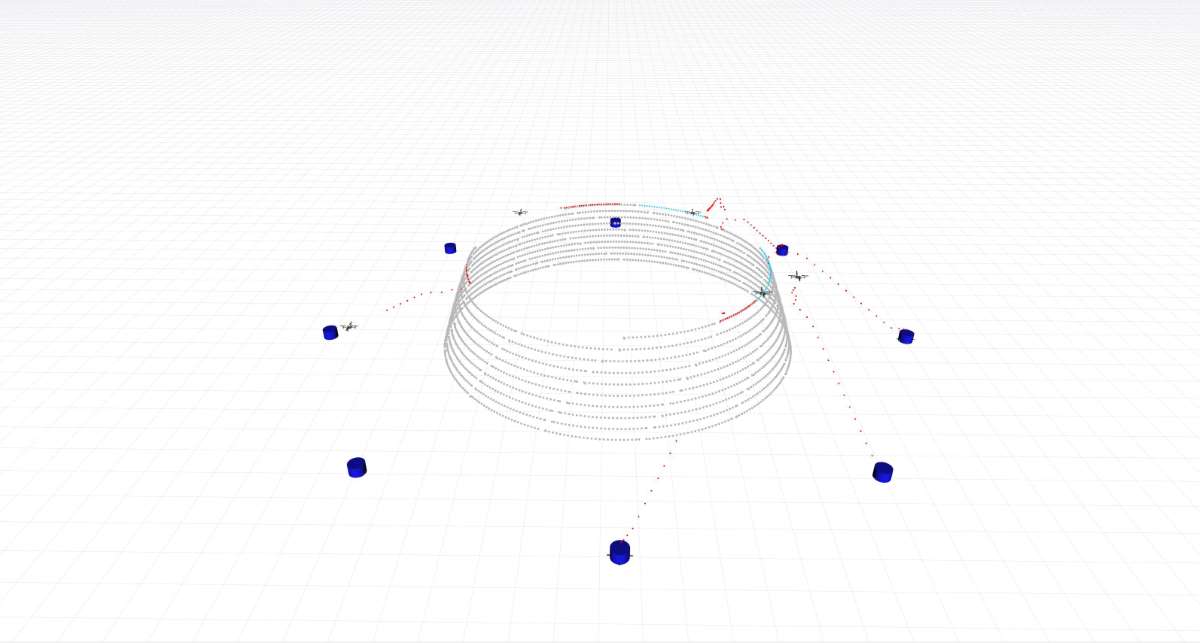
Die Drohnen arbeiten anhand eines einzigen Bauplans und passen ihre Arbeitsweise laufend an. Während des Fluges sind sie autonom, werden aber von einem Menschen überwacht, der den Fortschritt kontrolliert und bei Bedarf auf der Grundlage der von den Drohnen gelieferten Informationen eingreifen kann.
Sie sehen gerade einen Platzhalterinhalt von YouTube. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Mehr InformationenDrohnen müssen sehr präzise navigieren
Die Leitung des Forschungsteams lag am Imperial College London und der Empa, der Eidgenössischen Materialprüfungs- und Forschungsanstalt. Stefan Leutenegger, seit 2021 Professor für Machine Leaning for Robotics an der Technischen Universität München (TUM) und Reader am Imperial College London, war einer der Hauptverantwortlichen des Projekts. „Die größte Herausforderung für mein Team und mich war es, die Drohnen in die Lage zu versetzen, sehr präzise zu navigieren. Dafür mussten sie auch ihre Sensoren, beispielsweise Kameras, nutzen, um die Struktur, die sie gedruckt haben, genau zu erfassen und ihre Arbeitsweise an die gesammelten Daten anzupassen“, sagt Stefan Leutenegger. Hauptautor Prof. Mirko Kovac vom Department of Aeronautics des Imperial College London und dem Materials and Technology Center of Robotics der Empa sagt: “Wir haben bewiesen, dass Drohnen autonom und im Tandem arbeiten können, um Gebäude zu bauen und zu reparieren, zumindest im Labor. Unsere Lösung ist skalierbar und könnte uns in Zukunft helfen, Gebäude in schwer zugänglichen Gebieten zu bauen und zu reparieren.”
Zwei Typen von Drohnen
Die Aerial-AM-Flotte besteht zum einen aus den „BuilDrones“, die während des Fluges Materialien auftragen. Den zweiten Baustein bilden die „ScanDrones“, die kontinuierlich die Leistung der BuilDrones messen und die nächsten Schritte vorgeben. Um das Konzept zu testen, entwickelten die Forscher vier maßgeschneiderte Zementmischungen, mit denen die Drohnen bauen sollten. Während des Bauprozesses bewerteten die Drohnen die gedruckte Geometrie in Echtzeit und passten ihr Verhalten an, um sicherzustellen, dass sie die Vorgaben mit einer Genauigkeit von fünf Millimetern erfüllten.
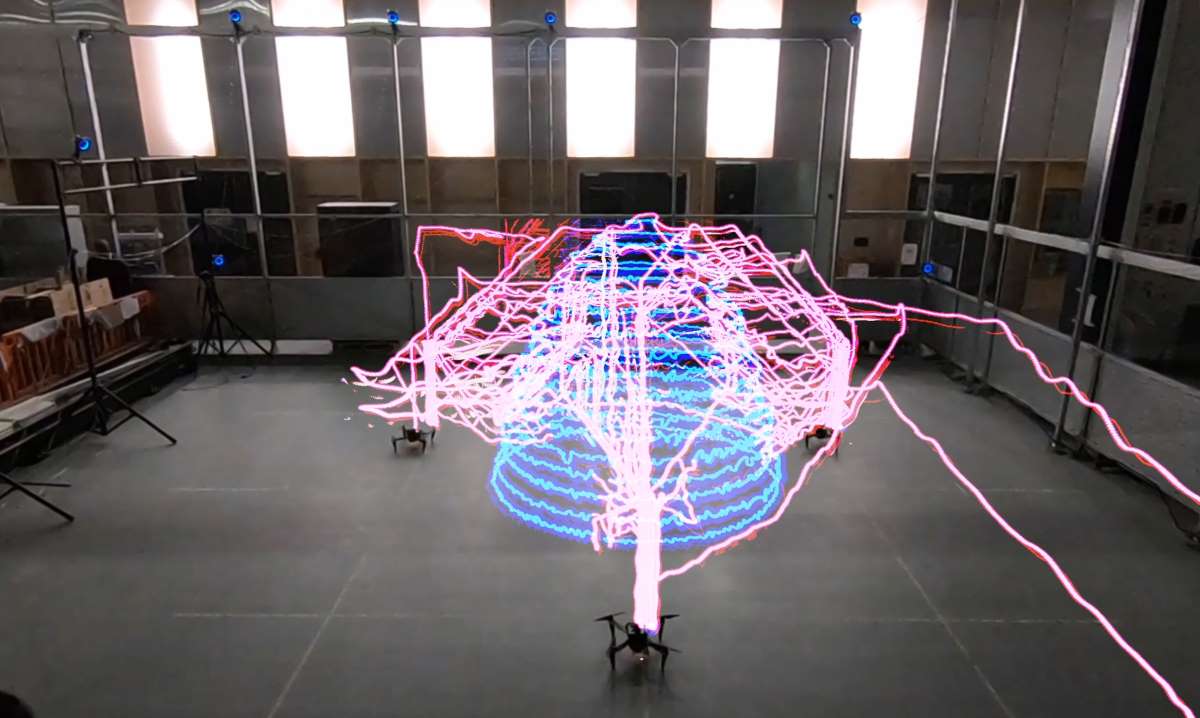
Um das Potenzial des Verfahrens zu demonstrieren, druckte das Team einen 2,05 Meter hohen Zylinder, der in 72 Schichten mit einem Schaumstoff auf Polyurethanbasis gedruckt wurde, und einen kleineren Zylinder (18 cm), der mit einem speziell entwickelten zementartigen Material gedruckt wurde.


Zukünftige Forschung an der TUM
Stefan Leutenegger setzt seine Robotik-Forschung an der TUM fort. Für ein aktuelles Projekt kooperiert er mit Kathrin Dörfler, Professorin für Digitale Fabrikation an der TUM. Im Oktober startet ihr gemeinsames Projekt “Spatial AI for Cooperative Construction Robotics”, das durch das TUM Georg Nemetschek Institute Artificial Intelligence for the Built World gefördert wird. Eines der Ziele ist es, Robotern beizubringen, sich auf realen Baustellen zu bewegen – inmitten von Menschen und Maschinen, die ständig in Bewegung sind und zwischen Strukturen, die sich täglich ändern können. “Wir wollen Robotern helfen, sicher zu kooperieren”, sagt Stefan Leutenegger, “untereinander und mit Menschen”. Künftige Projekte werden diese neuen Ansätze mit additiven Fertigungstechnologien kombinieren, wie sie im aktuellen Artikel beschrieben werden.
Publikation
Zhang, K., Chermprayong, P., Xiao, F., Tzoumanikas, D., Dams, B., Kay, S., Kocer, B.B., Burns, A., Orr, L., Choi, C., Darekar, D.D., Li, W., Hirschmann, S., Soana, V., Awang Ngah, S., Sareh, S., Choubey, A., Margheri, L., Pawar, V.M., Ball, R.J., Williams, C., Shepherd, P., Leutenegger, S., Stuart-Smith, R. & Kovac, M. Aerial additive manufacturing with multiple autonomous robots. Nature 609, 709–717 (2022). DOI:10.1038/s41586-022-04988-4
Quelle: Technische Universität München


